- Satteläcker 17, 70565 Stuttgart, Germany

Relative Positionierung unterscheidet sich von absoluter Positionierung. Ein unabhängiger Empfänger muss die Positionierung basierend auf den Informationen der Navigationsnachricht durchführen. Bei der relativen Positionierung wird die Lage eines unbekannten Punktes relativ zu einem bekannten Punkt bestimmt (basierend auf der Definition der BASE LINE). Manche Menschen verwechseln relative Positionierung mit differentieller Positionierung, obwohl die differentielle Positionierung nur Code-Messungen verwendet und eine Genauigkeit von etwa 0,5 bis 1 Meter erreichen kann. Die Gleichungen des DGPS (Differentielles GPS) verwenden bodengestützte Referenzstationen, die Satelliten verfolgen. Die von diesen Referenzstationen berechneten Korrekturdaten werden über Kommunikationssysteme an kompatible Empfänger gesendet, die diese Daten dann zur Korrektur ihrer Koordinaten nutzen. Relative Positionierung verwendet sowohl Phasen- als auch Code-Messungen. Ein Beispiel für diese Methode ist die Echtzeit-Kinematik (RTK)-Positionierung, die in Dual-Frequenz-Empfängern verwendet wird. RTK-Vermessungen gehören zu den interessantesten Innovationen in der relativen Positionierung, bei denen zwei Empfänger über Funk oder das Internet miteinander verbunden sind, um gleichzeitig Phasenbeobachtungen zu sammeln. Diese Methode ist in verschiedenen hochpräzisen Positionierungsaufgaben anwendbar, wie zum Beispiel Katastervermessungen, Ingenieurvermessungen, Navigation und mobile Kartierung. Zu den Methoden der relativen Positionierung gehören RTK, statische, PPK (Post-Processed Kinematic) und Stop-and-Go, die jeweils kurz beschrieben werden:
Die Real-Time Kinematic (RTK)-Methode wird für die differentielle Positionierung durch Trägerphasenmessungen verwendet. RTK ermöglicht die Erreichung von Genauigkeiten im Zentimeterbereich in Echtzeit. Bei dieser Methode wird ein Basiseinheitsempfänger an einem Punkt mit bekannten Koordinaten aufgestellt, und die Daten werden in Echtzeit an einen mobilen Empfänger übertragen. Der mobile Empfänger verarbeitet diese Daten, um die Positionierungsgenauigkeit zu verbessern. Der Positionsfehler bei RTK steigt mit der Entfernung zwischen dem Referenzempfänger und dem mobilen Empfänger. RTK ist in zwei Formen verfügbar: Klassisches RTK und RTK über das Internet.
Klassisches RTK: Ein Basiseinheitsempfänger wird an einem bekannten Punkt aufgestellt und sendet Korrekturen per Funk an den mobilen Empfänger.
RTK über das Internet: Korrekturen werden über das Internet empfangen, wodurch die Positionierung nur mit einem Empfänger möglich ist. RTK über das Internet kann als Einzelsystem oder als netzwerkbasiertes System implementiert werden.
Vorteile von RTK: Bietet Echtzeitergebnisse, die es Vermessern ermöglichen, die Genauigkeit der Messungen sofort zu beurteilen und Fehler vor Ort zu identifizieren und zu korrigieren. Dies reduziert den Papieraufwand und minimiert die Notwendigkeit für Wiederholungsbesuche im Gelände zur Datenüberprüfung.

Bei der statischen Positionierungsmethode hat mindestens einer der Punkte bekannte Koordinaten. Ein Empfänger wird am bekannten Punkt platziert, und der andere Empfänger wird am unbekannten Punkt positioniert. Beide Empfänger müssen gleichzeitig Beobachtungen sammeln. Die Methode basiert auf der Bildung einer Basislinie und der Lösung des Basislinienvektors. Dieser Ansatz kann eine Genauigkeit im Millimeterbereich erreichen und wird zur Festlegung permanenter Punkte oder Referenzpunkte verwendet. Die Genauigkeit verbessert sich mit längeren Beobachtungszeiten oder kürzeren Basislinien.
Die Stop & Go Methode ist ein kinematischer Ansatz. Sie beinhaltet die anfängliche Einrichtung und Beobachtung an spezifischen Punkten, an denen präzise Koordinaten benötigt werden. Die Beobachtungen werden an jedem Punkt mehrere Minuten lang durchgeführt, während die Kommunikation mit den Satelliten aufrechterhalten wird. Das Verfahren beginnt damit, dass an einem unbekannten Punkt für einige Minuten Beobachtungen durchgeführt werden, dann zu einem anderen Punkt gewechselt und dort die Beobachtungen wiederholt werden. Dieser Prozess wird für alle unbekannten Punkte durchgeführt. Nach ein bis zwei Stunden kehrt man zum ersten unbekannten Punkt zurück, um zusätzliche Beobachtungen durchzuführen, und das gleiche Verfahren wird für die anderen unbekannten Punkte befolgt.
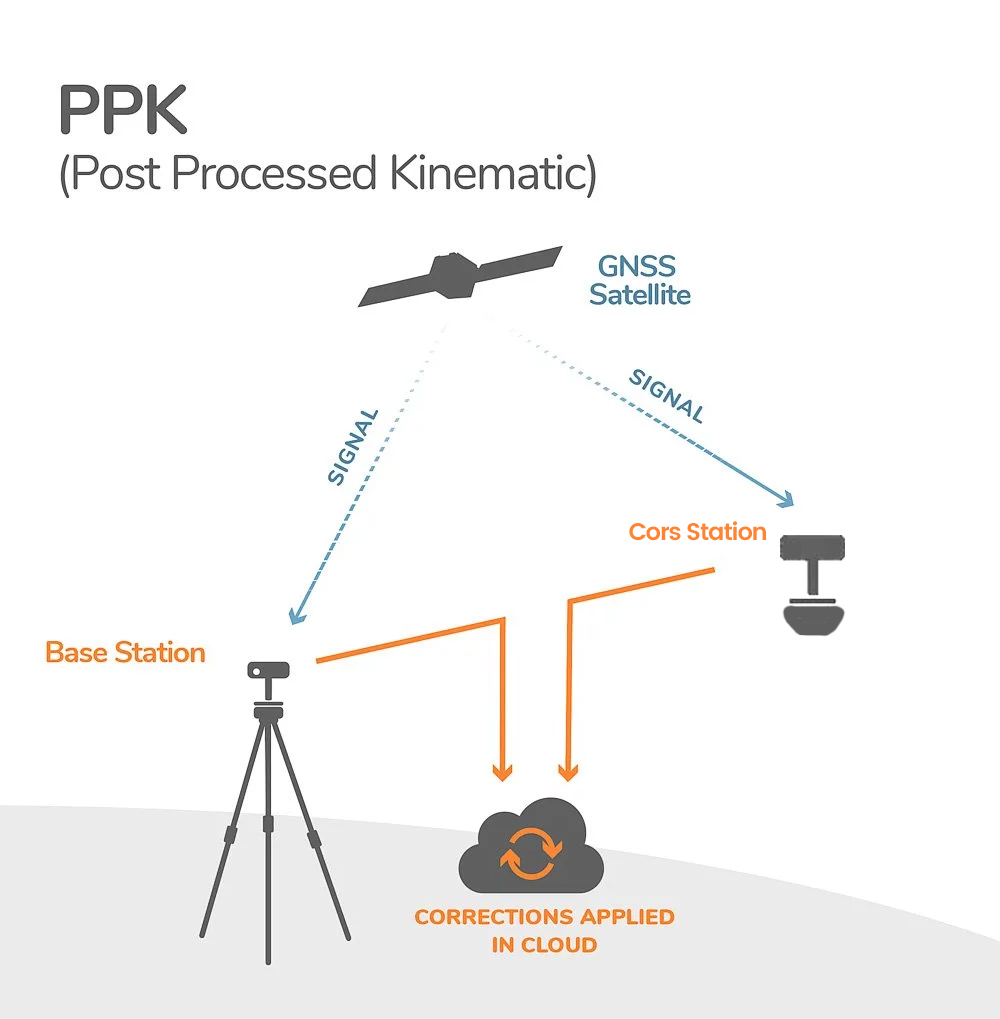
Die PPK-Methode ähnelt der RTK-Methode, unterscheidet sich jedoch darin, dass die Korrekturen im Nachhinein und nicht in Echtzeit angewendet werden. Bei PPK werden die Korrekturen im Gegensatz zu RTK nach der Datenerfassung mithilfe separater Software vorgenommen. Die Qualität der Ergebnisse hängt von den Datenerfassungsmethoden, den Umweltbedingungen zum Zeitpunkt der Erfassung und den Fähigkeiten der Verarbeitungssoftware ab. Beide Methoden, RTK und PPK, haben ihre spezifischen Vorteile:
Vorteile von PPK: Besonders nützlich in Gebieten mit unzureichenden Kommunikationsmöglichkeiten für Echtzeitkorrekturen. In solchen Fällen können Rohdaten ähnlich wie bei statischen Methoden gespeichert und später nachträglich verarbeitet werden. Während der Datenerfassung für PPK können an bestimmten Punkten Daten gesammelt werden, ähnlich wie bei der Stop & Go Methode. Zusätzlich ermöglicht PPK nach der Verarbeitung die Beobachtung der Position des Empfängers in jedem Epoche während der Bewegung.
Sowohl statische als auch PPK-Methoden erfordern spezielle Software für die Verarbeitung. Für die PPK-Nachbearbeitung kann das ShimiM-Online-System verwendet werden oder Bürosoftware wie LGO für die Datenverarbeitung.
Referenzen:


Der Nerxon-Multifrequenz-Lasermesser ist eine völlig neue und innovative Technologie, die fortschrittliche IMU-, GNSS- und Lasertechnologien integriert. Diese Integration überwindet erheblich die typischen Einschränkungen, die bei der Landvermessung, im Bauwesen und ...

Nerxon stellt das N900 vor: Ein revolutionäres visuelles Positionierungssystem mit integrierter GNSS-Technologie Nerxon freut sich, die Einführung seiner neuesten Innovation, des N900, bekannt zu geben – ein hochmodernes visuelles Positionierungssystem ...

Nerxon präsentiert revolutionäre GNSS-Technologie auf der INTERGEO 2024 Nerxon freut sich, die Einführung seines neuesten Durchbruchs in der GNSS-Technologie auf der INTERGEO 2024 bekannt zu geben, einer führenden globalen Veranstaltung ...

Fortschrittliche mobile Anwendung und nahtlose Integration Die mobile Anwendung von Nerxon, entwickelt für die vollständige Kontrolle über das Gerät, ist mit integrierten Augmented Reality (AR)-Funktionen ausgestattet. Dies bietet eine interaktive ...