- Satteläcker 17, 70565 Stuttgart, Germany

Es ist entscheidend, die Fähigkeiten von Satellitenempfängern vor Arbeitsbeginn zu verstehen. Bei der Arbeit mit GPS ist keine Sichtverbindung zwischen den Punkten erforderlich. GPS arbeitet rund um die Uhr, sieben Tage die Woche, und liefert unter nahezu allen Wetterbedingungen genaue geodätische Ergebnisse. Es ermöglicht mehr Beobachtungen mit weniger Personalaufwand. Es ist jedoch auch wichtig, sich der Einschränkungen von GPS bewusst zu sein. GPS-Empfänger müssen sich mit mindestens vier Satelliten verbinden. Bäume oder hohe Gebäude können die Verbindung zu GPS behindern. Zudem ist GPS für Vermessungen in Innenräumen oder geschlossenen Räumen nicht geeignet. In einigen Fällen kann eine optische Totalstation geeigneter und effektiver sein.
Je nach Aufgabe kann eine der verschiedenen Beobachtungsmethoden ausgewählt werden:
Die primäre Technik für GPS-Vermessungen ist die statische Vermessung. Um eine lange Basislinie (20 Kilometer/16 Meilen oder mehr) zu beobachten, platzieren Sie den Referenzempfänger an einem bekannten Punkt. Anschließend positionieren Sie den zweiten Empfänger, den sogenannten Rover, am anderen Ende der Basislinie. Legen Sie dann gleiche Intervalle für die Datenerfassung fest – typischerweise 15, 30 oder 60 Sekunden – und führen Sie die Vermessung durch, indem Sie die Empfänger für mindestens eine Stunde eingeschaltet lassen. Abhängig von der Länge der Basislinie, der Anzahl der sichtbaren Satelliten und der relativen Geometrie der Satelliten kann es notwendig sein, mehr Zeit für die Vermessung einzuplanen. Denken Sie daran: Überprüfen Sie alles doppelt, um Fehler zu vermeiden. Sobald genügend Daten gesammelt wurden, schalten Sie den Rover aus und gehen Sie zur nächsten Basislinie über, wobei Sie diesen Vorgang für jede neue Basislinie wiederholen. Um die Datenerfassungsphase zu beschleunigen, können Sie einen weiteren Rover hinzufügen und zwischen den beiden Rovern abwechseln, um jede Basislinie zu vermessen.
Wenn Sie an einem Standort arbeiten, an dem noch nie eine GPS-Vermessung durchgeführt wurde, müssen Sie zuerst mehrere Punkte mit bekannten Koordinaten festlegen, um Transformationen zu berechnen. Wählen Sie einen Punkt für den Referenzempfänger aus und bewegen Sie sich dann zu jedem der bekannten Punkte mit einem oder mehreren Rovern. Ähnlich wie bei der statischen Vermessung hängt die Zeit, die jeder Rover benötigt, um zu messen, von der Länge der Basislinie und dem GDOP (Geometrische Verdünnung der Präzision) ab. Nach der Datenerfassung und der Rückkehr ins Büro zur Verarbeitung sollten Sie durch erneutes Messen der gleichen Punkte zu verschiedenen Tageszeiten auf Fehler überprüfen.
Richten Sie den Referenzempfänger ein und konfigurieren Sie ihn, und platzieren Sie den Rover am anderen Ende der Basislinie. Stellen Sie sicher, dass die Geräte stationär bleiben, schalten Sie beide Empfänger ein und warten Sie 5 bis 20 Minuten (dieser Zeitraum hängt von der Anzahl der sichtbaren Satelliten und der Basislänge ab). Sobald die Daten gesammelt sind, können Sie mit dem Rover beginnen, sich zu bewegen. Punkte können in vordefinierten Zeitintervallen, vordefinierten räumlichen Intervallen oder beidem aufgezeichnet werden. In jedem Fall sollten Sie versuchen, Hindernisse zu vermeiden, die das Signal des Empfängers blockieren könnten. Wenn die Sicht des Empfängers auf die Satelliten auf weniger als vier Satelliten sinkt, bewegen Sie den Empfänger an einen Ort, an dem er vier oder mehr Satelliten sehen kann. Lassen Sie in dieser Situation Zeit für die Phasenmehrdeutigkeit zur Lösung, bevor Sie die Vermessung fortsetzen.
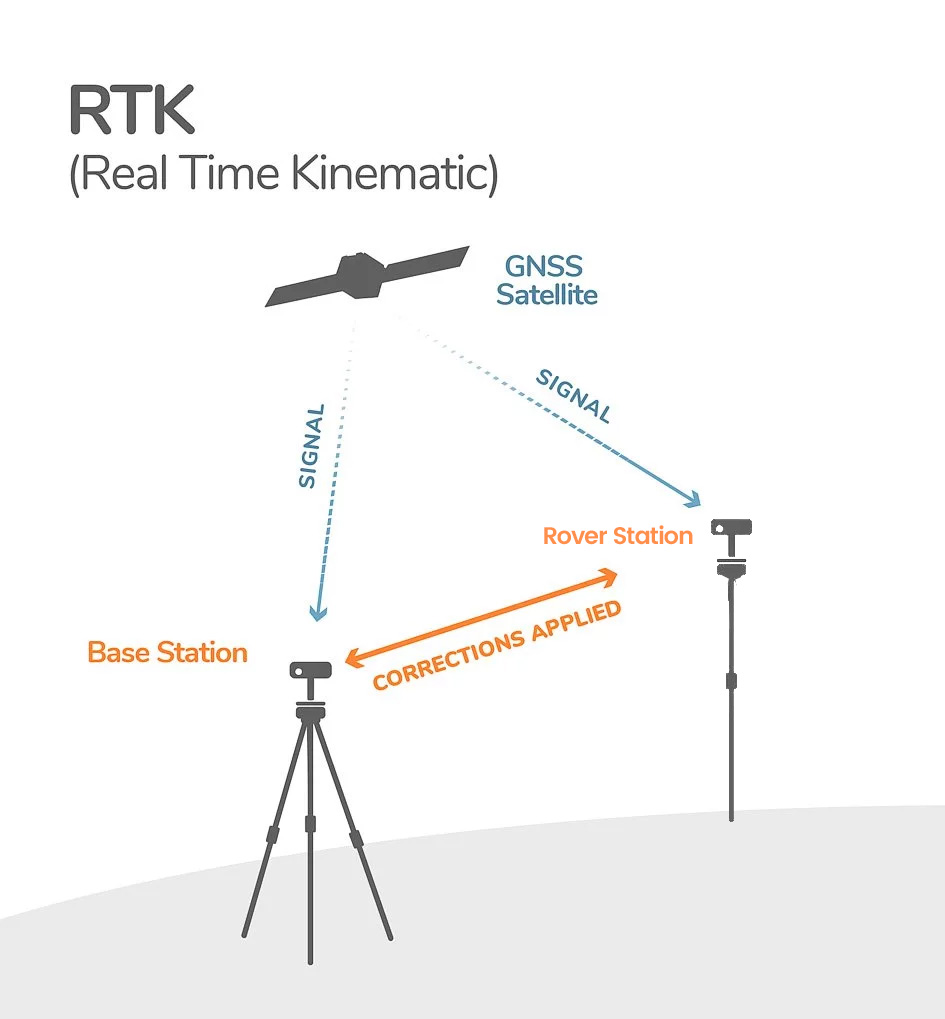
RTK ist eine Alternative zu kinematischen Beobachtungen. Der Roverempfänger empfängt Signale von der Referenzstation, hat aber auch seine eigene GPS-Antenne, die direkt Satellitensignale empfängt. Der Rover verarbeitet dann beide Signale, um die Phasenmehrdeutigkeit zu lösen. Beginnen Sie damit, den Referenzempfänger einzurichten und zu konfigurieren. Sobald der Referenzempfänger beginnt, Satellitensignale zu empfangen, können Sie den Rover einschalten. Warten Sie, bis der Rover sowohl die Satelliten- als auch die Referenzstationssignale empfängt. Sobald dies geschieht, wird der Rover „initialisiert“, löst die Phasenmehrdeutigkeit und ist bereit, Punkte und Koordinaten aufzuzeichnen. Basislinienbeobachtungen mit dieser Methode erreichen eine Genauigkeit von 1 bis 3 Zentimetern. Stellen Sie sicher, dass die Verbindung zur Referenzstation nicht verloren geht, da ein Verbindungsverlust dazu führt, dass der Rover die Phasenmehrdeutigkeit verliert und die Genauigkeit beeinträchtigt wird. Überwachen Sie das Funkmodem, da Störungen in den Funkwellen die Übertragung der Korrekturen stören können. Achten Sie darauf, dass Antennen während der Übertragung und des Empfangs nicht von hohen Gebäuden blockiert werden, und vermeiden Sie die Verwendung langer Kabel für die Antenne, da dies die Signale schwächen kann.
Referenzen:


Der Nerxon-Multifrequenz-Lasermesser ist eine völlig neue und innovative Technologie, die fortschrittliche IMU-, GNSS- und Lasertechnologien integriert. Diese Integration überwindet erheblich die typischen Einschränkungen, die bei der Landvermessung, im Bauwesen und ...

Nerxon stellt das N900 vor: Ein revolutionäres visuelles Positionierungssystem mit integrierter GNSS-Technologie Nerxon freut sich, die Einführung seiner neuesten Innovation, des N900, bekannt zu geben – ein hochmodernes visuelles Positionierungssystem ...

Nerxon präsentiert revolutionäre GNSS-Technologie auf der INTERGEO 2024 Nerxon freut sich, die Einführung seines neuesten Durchbruchs in der GNSS-Technologie auf der INTERGEO 2024 bekannt zu geben, einer führenden globalen Veranstaltung ...

Fortschrittliche mobile Anwendung und nahtlose Integration Die mobile Anwendung von Nerxon, entwickelt für die vollständige Kontrolle über das Gerät, ist mit integrierten Augmented Reality (AR)-Funktionen ausgestattet. Dies bietet eine interaktive ...